Summary of Chapter 1: The Reinforcement Learning Problem
RL
Author
Fabian
Published
2026-01-10
Summary of Chapter 1: The Reinforcement Learning Problem
Notes based on the book Sutton, R. S., & Barto, A. G. (2018). Reinforcement learning: An introduction. MIT press.
Chapter 1 introduces the fundamental concepts of Reinforcement Learning (RL) as a computational approach to learning from interaction.
1. The Nature of RL
Learning by Interaction: Unlike other machine learning paradigms, RL focuses on an agent interacting with an environment to achieve a goal. The agent senses the state of the environment, takes actions, and receives rewards.
Trial-and-Error: The agent is not told which actions to take (as in supervised learning). Instead, it must discover which actions yield the most reward by trying them.
Exploration vs. Exploitation: A central challenge is the trade-off between exploiting known actions that yield reward and exploring new actions that might yield higher reward in the future. The agent cannot exclusively do either and succeed.
Key Elements of an RL System
Policy (): Defines the agent’s behavior at a given time; a mapping from perceived states to actions.
Reward Signal (): Defines the goal. It is a single number sent by the environment indicating the immediate goodness of an event. The agent tries to maximize the total reward over the long run.
Value Function (): Specifies what is good in the long run. The value of a state is the total amount of reward an agent can expect to accumulate starting from that state. While rewards are primary, values are what we use to make decisions.
Model of the Environment (Optional): Mimics the behavior of the environment (e.g., predicting the next state and reward) to allow for planning.
The Tic-Tac-Toe Example The chapter uses Tic-Tac-Toe to contrast RL with other methods:
Evolutionary Methods: Might search the space of policies directly, ignoring the internal structure of the game (win/loss only).
Value Function Method (RL): Learns a value for every possible state (probability of winning from that state).
Greedy moves: Most of the time, the agent moves to the state with the highest estimated value.
Exploratory moves: Occasionally, it chooses a random move to learn about new states.
Learning Rule: When moving from state to , the value of is updated to be closer to the value of :
This is a Temporal-Difference (TD) learning update.
Python Implementation: Tic-Tac-Toe Agent
This code implements the reinforcement learning agent described in Section 1.5. It learns to play Tic-Tac-Toe by playing against itself (self-play), updating its value function estimates based on the outcome of moves.
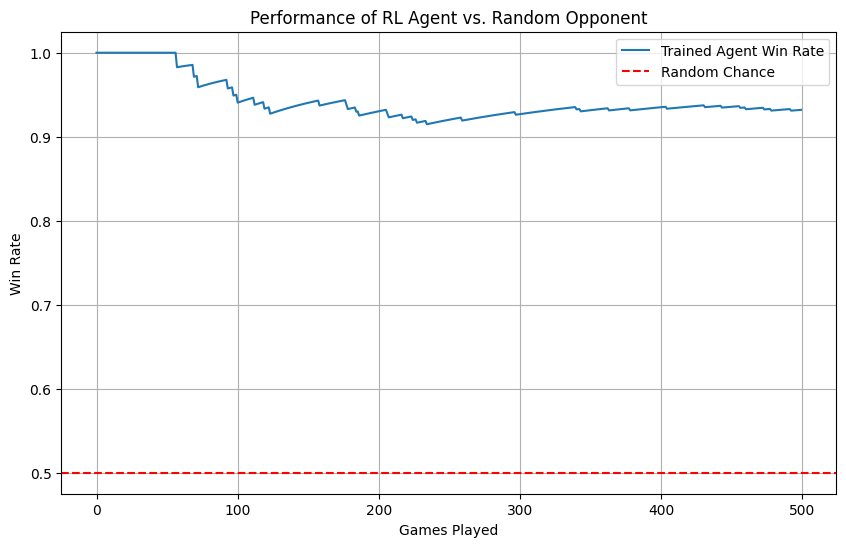
import numpy as npimport matplotlib.pyplot as pltimport pickle# --- Game Environment ---class TicTacToe:def__init__(self):self.board = np.zeros((3, 3))self.p1 =1# Agent 1 (X)self.p2 =-1# Agent 2 (O)self.is_end =Falseself.board_hash =Noneself.turn =1def get_hash(self):# Hash the board state to store in the value tableself.board_hash =str(self.board.reshape(3*3))returnself.board_hashdef winner(self):# Check rows, cols, diagonalsfor i inrange(3):ifsum(self.board[i, :]) ==3orsum(self.board[:, i]) ==3:self.is_end =Truereturn1ifsum(self.board[i, :]) ==-3orsum(self.board[:, i]) ==-3:self.is_end =Truereturn-1 diag_sum1 =sum([self.board[i, i] for i inrange(3)]) diag_sum2 =sum([self.board[i, 2- i] for i inrange(3)])if diag_sum1 ==3or diag_sum2 ==3:self.is_end =Truereturn1if diag_sum1 ==-3or diag_sum2 ==-3:self.is_end =Truereturn-1iflen(self.available_positions()) ==0:self.is_end =Truereturn0# Drawself.is_end =FalsereturnNonedef available_positions(self): positions = []for i inrange(3):for j inrange(3):ifself.board[i, j] ==0: positions.append((i, j))return positionsdef update_state(self, position):self.board[position] =self.turnself.turn =-1ifself.turn ==1else1def give_reward(self): result =self.winner()if result ==1:return1, 0# P1 winselif result ==-1:return0, 1# P2 winselse:return0.1, 0.5# Draw (slight reward for not losing)def reset(self):self.board = np.zeros((3, 3))self.is_end =Falseself.turn =1self.board_hash =None# --- RL Agent ---class Agent:def__init__(self, name, exp_rate=0.3):self.name = nameself.states = [] # Record all positions takenself.lr =0.2# Learning Rate (Alpha)self.exp_rate = exp_rate # Epsilonself.decay_gamma =0.9self.states_value = {} # State -> Value mappingdef get_hash(self, board):returnstr(board.reshape(3*3))def choose_action(self, positions, current_board, symbol):if np.random.uniform(0, 1) <=self.exp_rate:# Exploration: choose random action idx = np.random.choice(len(positions)) action = positions[idx]else:# Exploitation: choose greedy action (max value) value_max =-999for p in positions: next_board = current_board.copy() next_board[p] = symbol next_board_hash =self.get_hash(next_board) value =0ifself.states_value.get(next_board_hash) isNoneelseself.states_value.get(next_board_hash)if value >= value_max: value_max = value action = preturn action# Store state historydef add_state(self, state):self.states.append(state)# Update Value Function (Backpropagation of Reward)# V(s) = V(s) + alpha * (V(s') - V(s))def feed_reward(self, reward):for st inreversed(self.states):ifself.states_value.get(st) isNone:self.states_value[st] =0# TD Update ruleself.states_value[st] +=self.lr * (self.decay_gamma * reward -self.states_value[st]) reward =self.states_value[st]self.states = [] # Clear history after gamedef reset(self):self.states = []# --- Training and Simulation ---def train(rounds=1000): p1 = Agent("p1") p2 = Agent("p2") env = TicTacToe()print("Training Agents...")for i inrange(rounds):if i %1000==0:print("Rounds {}".format(i))whilenot env.is_end:# Player 1 Move positions = env.available_positions() p1_action = p1.choose_action(positions, env.board, 1) env.update_state(p1_action) board_hash = env.get_hash() p1.add_state(board_hash) win = env.winner()if win isnotNone: reward_1, reward_2 = env.give_reward() p1.feed_reward(reward_1) p2.feed_reward(reward_2) p1.reset() p2.reset() env.reset()break# Player 2 Move positions = env.available_positions() p2_action = p2.choose_action(positions, env.board, -1) env.update_state(p2_action) board_hash = env.get_hash() p2.add_state(board_hash) win = env.winner()if win isnotNone: reward_1, reward_2 = env.give_reward() p1.feed_reward(reward_1) p2.feed_reward(reward_2) p1.reset() p2.reset() env.reset()breakreturn p1# --- Evaluate Performance ---def evaluate(p1, rounds=200):# p1 plays against a random player env = TicTacToe() random_p = Agent("random", exp_rate=1.0) # Always explores (random) p1.exp_rate =0# Turn off exploration for evaluation win_history = []for i inrange(rounds):whilenot env.is_end:# P1 (Trained) positions = env.available_positions() p1_action = p1.choose_action(positions, env.board, 1) env.update_state(p1_action)if env.winner() isnotNone:if env.winner() ==1: win_history.append(1)else: win_history.append(0) env.reset()break# Random Player positions = env.available_positions() p2_action = random_p.choose_action(positions, env.board, -1) env.update_state(p2_action)if env.winner() isnotNone:if env.winner() ==-1: win_history.append(0) # Losselse: win_history.append(0.5) # Draw env.reset()breakreturn win_history# Run Trainingp1_agent = train(5000)# Run Evaluation vs Random Agenthistory = evaluate(p1_agent, 500)# --- Visualization ---cumulative_wins = np.cumsum(history)win_rate = cumulative_wins / (np.arange(len(history)) +1)plt.figure(figsize=(10, 6))plt.plot(win_rate, label='Trained Agent Win Rate')plt.axhline(y=0.5, color='r', linestyle='--', label='Random Chance')plt.title('Performance of RL Agent vs. Random Opponent')plt.xlabel('Games Played')plt.ylabel('Win Rate')plt.legend()plt.grid(True)plt.show()
State Representation: The get_hash method converts the 3x3 board into a unique string. This serves as the “State” in the RL framework.
Value Table:self.states_value is a dictionary acting as the Value Function . It maps every board state hash to a numerical value representing the probability of winning.
Exploration vs. Exploitation: In choose_action, the exp_rate (epsilon) determines if the agent explores (random move) or exploits (chooses the move leading to the state with the highest value in states_value).
Temporal Difference Update: The feed_reward function implements the core math from Chapter 1. It iterates backward through the game history and updates the value of the previous state to be closer to the current reward (or next state’s value): self.states_value[st] += self.lr * (self.decay_gamma * reward - self.states_value[st]).
So why is the win rate getting worse?
the agent is playing against iself and the code pennalizes the draw
# From the provided evaluate function:if env.winner() ==1: win_history.append(1) # Win = 1.0else: win_history.append(0) # Draw = 0.0 (on P1's turn)
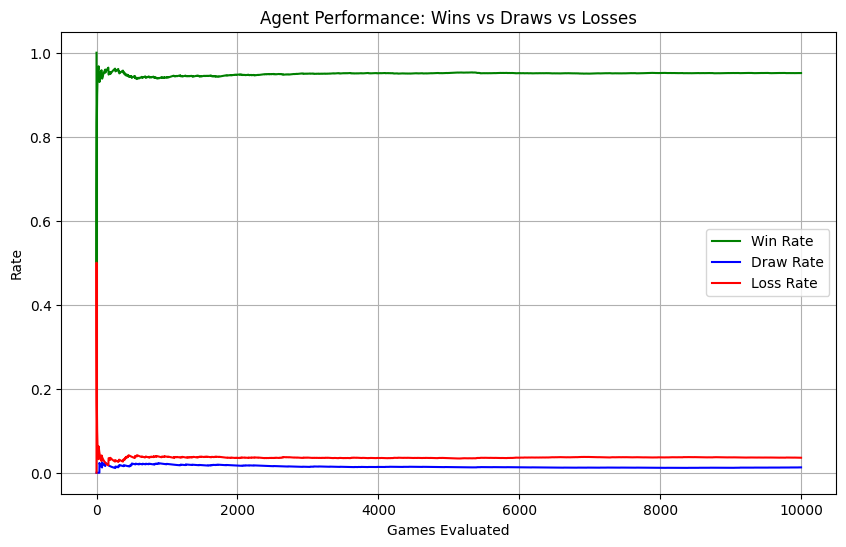
Lets plot the wins and draw to see if that is the case. lets try 10,000 rounds.
def evaluate_detailed(p1, rounds=500): env = TicTacToe() random_p = Agent("random", exp_rate=1.0) p1.exp_rate =0 results = [] # 1 for win, 0 for draw, -1 for lossfor i inrange(rounds):whilenot env.is_end:# P1 (Trained) positions = env.available_positions() p1_action = p1.choose_action(positions, env.board, 1) env.update_state(p1_action) win = env.winner()if win isnotNone: results.append(win) # 1=Win, 0=Draw, -1=Loss env.reset()break# Random Opponent positions = env.available_positions() p2_action = random_p.choose_action(positions, env.board, -1) env.update_state(p2_action) win = env.winner()if win isnotNone: results.append(win) env.reset()breakreturn results# ... [After Training] ...game_results = evaluate_detailed(p1_agent, 10000)# Process Resultswins = [1if r ==1else0for r in game_results]draws = [1if r ==0else0for r in game_results]losses = [1if r ==-1else0for r in game_results]# Cumulative Ratesgames_played = np.arange(1, len(game_results) +1)win_rate = np.cumsum(wins) / games_playeddraw_rate = np.cumsum(draws) / games_playedloss_rate = np.cumsum(losses) / games_played# Plottingplt.figure(figsize=(10, 6))plt.plot(win_rate, label='Win Rate', color='green')plt.plot(draw_rate, label='Draw Rate', color='blue')plt.plot(loss_rate, label='Loss Rate', color='red')plt.title('Agent Performance: Wins vs Draws vs Losses')plt.xlabel('Games Evaluated')plt.ylabel('Rate')plt.legend()plt.grid(True)plt.show()